

|
|
|
|
|
|
|
|
|
|||||||
|
||||||||
|
Product
Tools, Drivers, etc |
GESBC-5200Product SupportPre-compiled Binary Images Pre-compiled boot strap code. Pre-compiled device tree binary. Pre-compiled Linux 4.14 kernel image. Embedded Linux file system UBI image Embedded Linux File System. Pre-compiled boot strap code for SD card U-boot boot strategy. Pre-compiled U-boot binary for SD card boot (NAND FLASH not supported). Pre-compiled boot strap code. Pre-compiled device tree binary. Pre-compiled Linux 4.14 kernel image. Embedded Linux file system UBI image Embedded Linux File System. Pre-compiled boot strap code for SD card U-boot boot strategy. Pre-compiled U-boot binary for SD card boot (NAND FLASH not supported).
Getting StartedThe GESBC-5200 comes from factory with Linux pre-installed and ready to run.
When GESBC-5200 powers up the system boot message will be displayed on the terminal screen.
Power ConnectionThe GESBC-5200 Industrial Computer can use a wide range of DC power supply.
JTAG ConnectionThe GESBC-5200 supports JTAG interface. The JTAG connection is on the back side of the PCB with a 2x5 surface mount header (unpopulated from factory). The JTAG signal arrangement is shown in the following table
RS-232 Port connectionThe GESBC-5200 has a debug serial port P0 that can be connected to desktop system to debug/monitor system. The debug serial port communication settings are 115200,8,N,1. The DB9 connector P1 on the GESBC-5200 connects to FLEX COM4 of the processor. The Linux device node is /dev/ttyS1 when using factory installed device tree setting. The header connector P2 is connected to the FLEX COM1 of the processor. The Linux device node is /dev/ttyS2 when using factory installed device tree setting.
RS-485 ConnectionThe RS-485 interface on the GESBC-5200 is on the 3 pin 2.54mm spacing header P3. It is connected to FLEX COM3 of the SAMA5D27 processor. The Linux device node is /dev/ttyS3 using factory installed device tree setting.
Sample RS-485 communication C program to send data through the RS-485 port.
CAN BusThe GESBC-5200 supports one channel of CAN interface. The 3 pin 2.54mm spacing header P4 provides the CAN bus signals.
A 120ohm termination resistor can be connected across the CANH and CANL signal lines via a 2-pin jumper JP4.
ZigBee NetworkZigBee is a wireless technology developed as an open global standard to address the unique needs of low-cost, low-power wireless M2M networks. Applications include wireless light switches, electrical meters with in-home-displays, traffic management systems, and other consumer and industrial equipment. The GESBC-5200 contains a socket to provide direct plug-in interface to XBee line of modules by Digi. The GESBC-5200 can be easily configured as ZigBee network gateway with the ZigBee plug-in module. The XBee socket M1 signals are listed in the following table,
The serial port connected to the XBee socket is FLEX COM3. The Linux device node of the XBee port is /dev/ttyS4 when using factory installed device tree. Note: pins not listed in the above table have no connection on the GESBC-5200.
High Current Digital Output PortsThe GESBC-5200 has 8 high current drive digital outputs. The driver stage uses power MOSFET. The maximum voltage is 60VDC. The maximum continuous drain current @10VDC @32° is 1A. The terminal block J21 provides the digital output connection.
The output port can be controlled by sending a logic 1 or 0 to the corresponding device node. For example, echo "1" > /sys/class/gpio/pioB11/value Please note a logic value 1 send to the output will turn on the output MOSFET and pull the output low.
Protected Digital InputsThe GESBC-5200 has 6 protected digital inputs. The protected inputs can withstand over voltage up to 30V.
The input value can be read directly from the device node, for example, cat /sys/class/gpio/pioB20/value
4 channel 12(14) bit analog-to-digital converter inputsThe GESBC-5200 has 4 channel single ended analog inputs connected to the on-chip A/D.
Digital GPIO (LVTTL)/IO Expansion J24The GESBC-5200 has 14 LVTTL digital GPIO lines on J24 that also includes SPI and I2C bus. These GPIO ports are connected directly to the ARM processor. The maximum output current is 4mA. 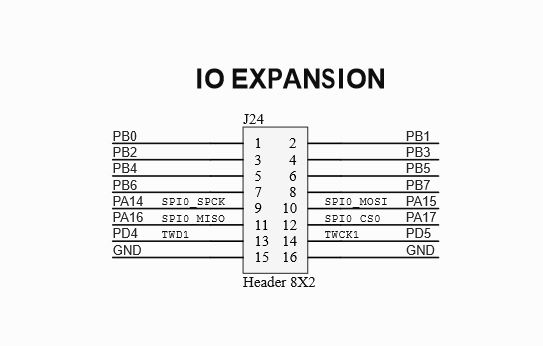
FLASH memory Allocation Map From FactoryThe GESBC-5200 has 128MB of NAND FLASH. The FLASH memory is "soft" partitioned into several regions as system storage. The storage map is shown in the following table.
Update System SoftwareThe Linux kernel and device tree binary can be updated in-system. The following example updates the Linux kernel image in the NAND FLASH, # flash_erase /dev/mtd2 0 0 # nandwrite -p /dev/mtd2 zImage Please note the example above assumes the kernel image size is less than 6MByte. The NAND FLASH must be erased before writing new kernel image.
Application DevelopmentCross DevelopmentA Linux based host system can be used as the cross development system. To use a general purpose Linux desktop for cross development the ARM Linux cross compiler and commonly used development tools must be installed. The factory installed embedded file system is based on Buildroot 2015.02 using glibc 2.19, binutils 2.25. The cross compiler tool chain must have compatible library in order for the cross compiled program to run on the target system. Below is a simple example cross compiling the hellowWorld application, arm-linux-gnueabi-gcc -o helloWorld helloWorld.c With cross compiler tool chain and development tools properly installed the cross compiling process is no different than native compiling process except the compiler name would be the cross compiler name. Below are two pre-built Linux virtual machine images (compatible with VMWare VMWorkstation VMPlayer) has ARM cross development tools installed and ready to use.
Additional InformationFor customers that would like to build their own Linux kernel and/or file system. The following link provides information on build tools, kernel source, etc. Linux & Open Source related information for Microchip SAMA5D27 ARM processor |