

|
|
|
|
|
|
|
|
|
|||||||
|
||||||||
|
Product
Tools, Drivers, etc |
GESBC-9X25Pre-compiled Binary Images Pre-compiled boot strap code. Pre-compiled U-boot binary. Pre-compiled Linux 2.6.39 kernel image. Embedded Linux file system UBI image Embedded Linux File System. Pre-compiled boot strap code. Pre-compiled U-boot binary. Pre-compiled Linux 2.6.39 kernel image. Embedded Linux file system UBI image Embedded Linux File System.
Board Connection Diagram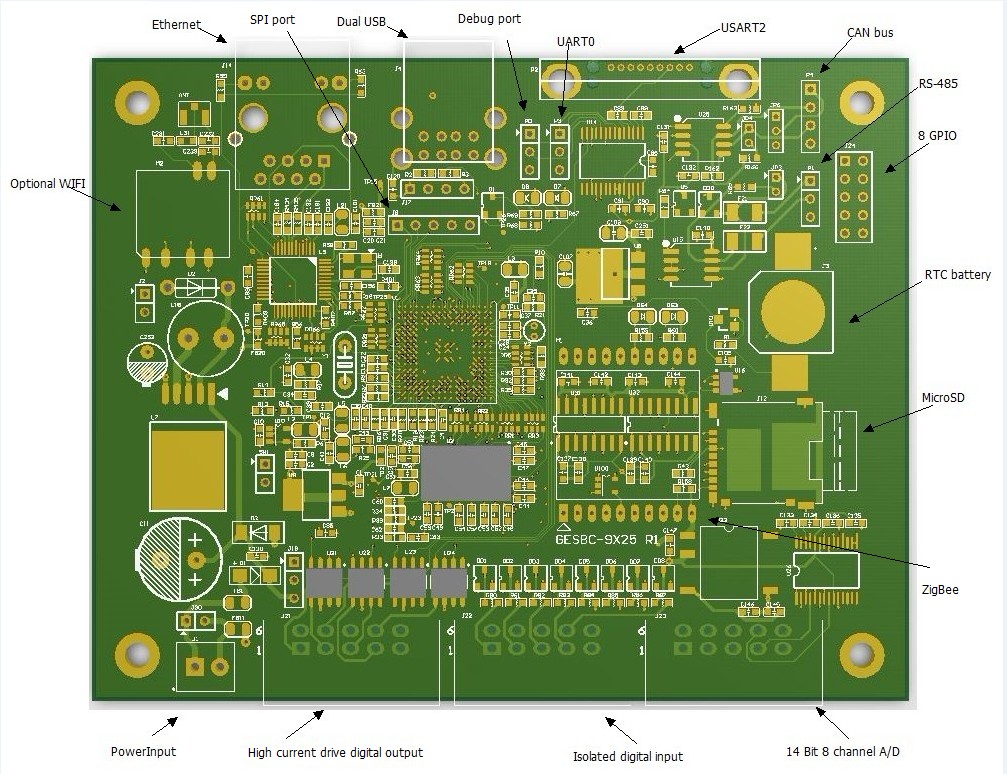
Getting StartedThe GESBC-9X25 comes from factory with Linux pre-installed and ready to run.
When GESBC-9X25 powers up the system boot message will be displayed on the terminal screen.
Power ConnectionThe GESBC-9X25 Industrial Computer can use a wide range of DC power supply.
JTAG ConnectionThe GESBC-9X25 supports JTAG interface. The JTAG connection is on the back side of the PCB with a 2x5 surface mount header (unpopulated from factory). The JTAG signal arrangement is shown in the following table
RS-232 Port connectionThe GESBC-9X25 has a debug serial port P1 that can be connected to desktop system to debug/monitor system. The debug serial port communication settings are 115200,8,N,1. The DB9 connector P2 on the GESBC-9X25 connects to USART2 of the processor. The header connector P3 is connected to the UART0 of the processor.
RS-485 ConnectionThe RS-485 interface on the GESBC-9X25 is on the 3 pin 2.54mm spacing header P1
The RS-485 port uses USART0 on the AT91SAM9X25 processor, normally corresponds to ttyS1 in Linux.
CAN Bus ConnectionThe CAN bus interface on the GESBC-9X25 is on the 4 pin 2.54mm spacing header P4
The 3 pin header JP6 sets the voltage on pin 1 of CAN bus interface P4
The following commands can be used to start the CAN interface, #: ip link set can0 type can bitrate 125000 #: ifconfig can0 up Sample CAN bus communication C program to send data through the CAN bus.
SPI BusThe SPI bus can be used to connect a variety of peripheral devices to further expand the functionality of the versatile GESBC-9X25 board. The GESBC-9X25 provides 1 external SPI connection through J8.
ZigBee NetworkZigBee is a wireless technology developed as an open global standard to address the unique needs of low-cost, low-power wireless M2M networks. Applications include wireless light switches, electrical meters with in-home-displays, traffic management systems, and other consumer and industrial equipment. The GESBC-9X25 contains a socket to provide direct plug-in interface to XBee line of modules by Digi. The GESBC-9X25 can be easily configured as ZigBee network gateway with the ZigBee plug-in module. The Xbee socket connects to physical port USART3 of the AT91SAM9X25 processor, normally ttyS4 in Linux. The XBee socket M1 signals are listed in the following table,
Note: pins not listed in the above table have no connection on the GESBC-9X25.
High Current Digital Output PortsThe GESBC-9X25 has 8 high current drive digital outputs each can supply up to 1A of current (total current drive on all ports depends on power supply capacity). The output can be configured as 5V or the same as the main power supply to the board (maximum voltage for the output port is 18VDC). The terminal block J21 provides the digital output connection.
Digital output voltage select jumper J18
Protected Digital InputsThe GESBC-9X25 has 8 fully isolated digital inputs. Minimum isolation voltage is 2500 Vrms. The protected inputs can withstand over voltage up to 30V.
8 channel 14 bit analog inputsThe GESBC-9X25 has a 14 bit 8 channel single ended or 4 channel differential analog to digital converter. It consists of a 4-channel differential/8-channel single-ended multiplexer, precision programmable gain amplifier, 14-bit successive approximation analog-to-digital (A/D) converter, and a precision voltage reference. The programmable-gain amplifier provides high input impedance, excellent gain accuracy, good common-mode rejection, and low noise. For many low-level signals, no external amplification or impedance buffering is needed between the signal source and the A/D input.
The CPU communicate with the A/D subsystem via SPI bus. Sample A/D converter C program.
Digital GPIO (LVTTL)The GESBC-9X25 has 8 LVTTL digital GPIO lines on J24. These GPIO ports are connected directly to the ARM processor. The maximum output current is 4mA.
FLASH memory Allocation Map From FactoryThe GESBC-9X25 has 128MB of NAND FLASH. The FLASH memory is "soft" partitioned into several regions as system storage. The storage map is shown in the following table.
Additional InformationFor customers that would like to build their own Linux kernel and/or file system. The following link provides information on build tools, kernel source, etc. Linux & Open Source related information for Atmel AT91SAM9Gx5 ARM Microcontrollers |